The Harvard Octobot`
A team of Harvard University researchers has developed the world’s first soft and autonomous robot – a development that could lay the foundation for a new generation of robots.
“One longstanding vision for the field of soft robotics has been to create robots that are entirely soft, but the struggle has always been in replacing rigid components like batteries and electronic controls with analogous soft systems and then putting it all together,” Robert Wood told Harvard News. Wood is the Charles River Professor of Engineering and Applied Sciences at the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS). He also co-authored the study “An integrated design and fabrication strategy for entirely soft, autonomous robots” published in the Nature journal.
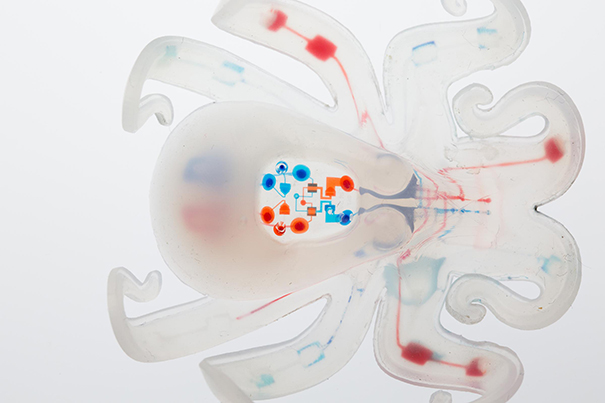
The Harvard University researchers nicknamed their soft and autonomous robot as Octobot. The octopus has long been an inspiration by researchers in the field of soft robotics because of the creature’s dexterity and strength despite having no internal skeleton.
Octobot’s soft robotic body was fabricated using soft lithography, molding and 3D printing. This soft and autonomous robot is powered by gas under pressure. According to the Harvard University research team, a reaction inside Octobot converts a small amount of hydrogen peroxide into a large amount of gas, which runs into the robot’s arms and inflates them similar to balloons. To control the reaction inside Octobot, the research team used a microfluidic logic circuit – described as a soft analog of a simple electronic oscillator that controls when hydrogen peroxide decomposes to gas.
The Harvard University research team plans to design in the future soft and autonomous robot that can swim, crawl and interact with its environment. “This research is a proof of concept. We hope that our approach for creating autonomous soft robots inspires roboticists, material scientists, and researchers focused on advanced manufacturing,” said Ryan Truby, a Harvard graduate student and co-first author of the study.






